You signed in with another tab or window. Reload to refresh your session.You signed out in another tab or window. Reload to refresh your session.You switched accounts on another tab or window. Reload to refresh your session.Dismiss alert
Hi, I want to realize the obstacle avoidance function for robot path planning. In the following codes I set a threshold for occupancy state . If getOccupancy() return a value larger than 0.5, this node will be regard as an obstacle.
I also use treeNode->setLogOdds() function to update the node occupancy value. If the manipulator can not reach this node or it collides the obstacle at this node. [Note]: I use a planning algorithm similar to A-star, based on Node.
auto reNode = tree->search(key);
reNode->setLogOdds(tree->getClampingThresMaxLog());
tree->updateInnerOccupancy();
However, the Rviz shows a wrong phenomenon. The first picture shows my initial planned path cross through the obstacle. So I check the all voxel and find where the planned path cross through is empty. Is that normal? If I use the Moveit embeded planner, it can plan a safe path for the manipulator. Can you help me to figure out why this happens? @ahornung
The text was updated successfully, but these errors were encountered:
Alternatively, I had tried dynamicEDT3D to build the tree by hand. And I use the setNodeValue to update the obstacle information. It seemed to be correct somehow. I need to check further because some errors happened when using my planner .
Hi, I want to realize the obstacle avoidance function for robot path planning. In the following codes I set a threshold for occupancy state . If
getOccupancy()return a value larger than 0.5, this node will be regard as an obstacle.I also use
treeNode->setLogOdds()function to update the node occupancy value. If the manipulator can not reach this node or it collides the obstacle at this node. [Note]: I use a planning algorithm similar to A-star, based on Node.However, the
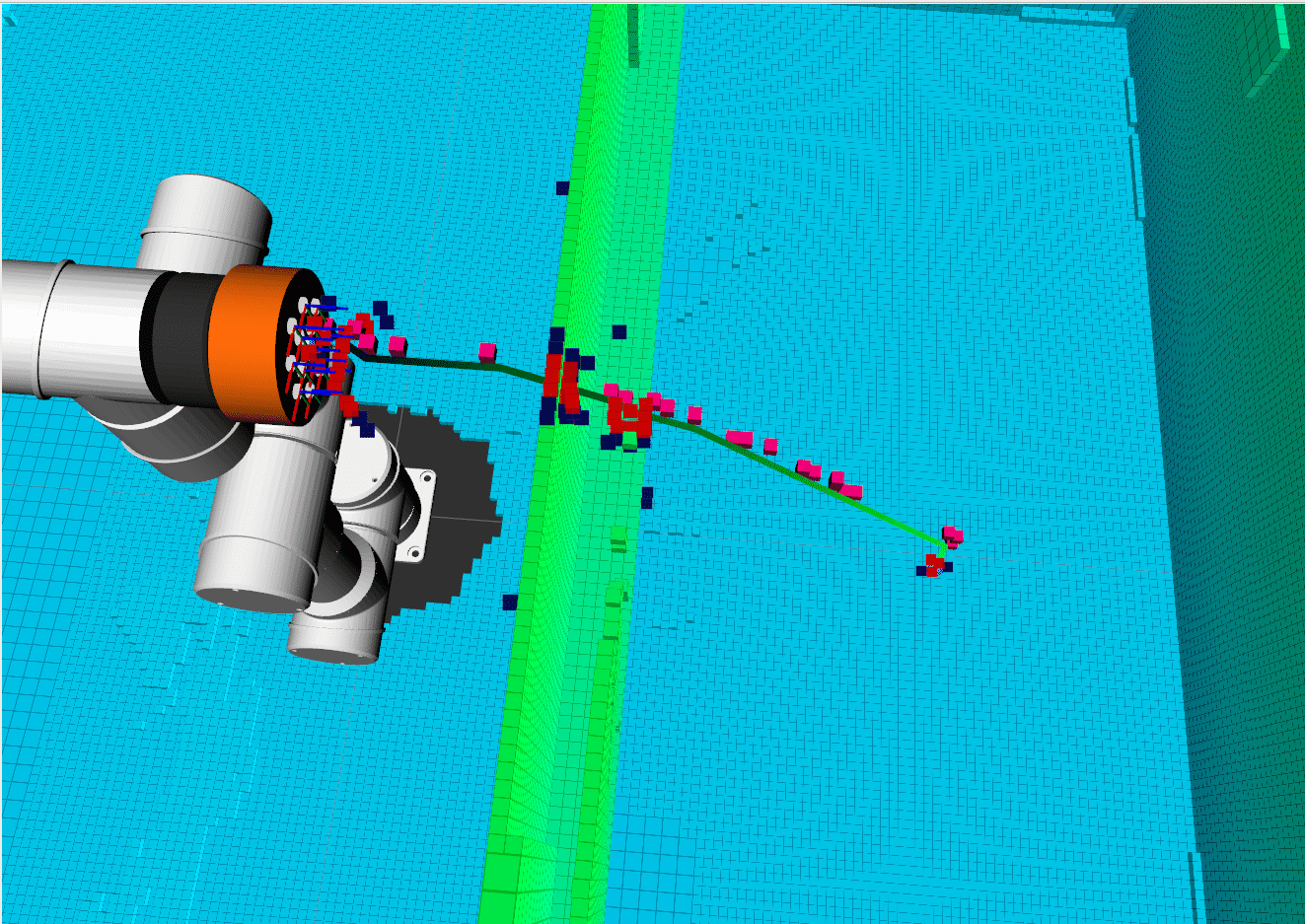
Rvizshows a wrong phenomenon. The first picture shows my initial planned path cross through the obstacle. So I check theall voxeland find where the planned path cross through is empty. Is that normal? If I use theMoveitembeded planner, it can plan a safe path for the manipulator. Can you help me to figure out why this happens? @ahornungThe text was updated successfully, but these errors were encountered: