目标设备:FPGA(本项目采用的是Xilinx Nexy4)
工程软件:Vivado 2018
编程语言:Verilog HDL
本项目包括:
1. DDR2 读写模块封装,方便移植
2. SD卡 读写控制模块
3. 数据和指令Cache
4. 五级流水线MIPS CPU(非主角)
[toc]
-
Shortcut
感谢我的坚实好友林mx(Tongji CS 2016)提供了本项目的SD卡读写模块,感谢Tongji CS 2015的陈z、黄yx、刘tc等大佬的答疑解惑,感谢香哥的真香警告给了我完成的动力。
本项目是原创作品,于2018年12月完成,本实验报告被迅速原封不动收录进该课程教材《计算机系统结构实验指导》一书。虽然书没有提到我,我也只是为学弟学妹做一点微小的贡献,但是既然有不止一个网友私信询问情况(说的像是我模仿了教材),特此说明一下我这个是原版。
本实验是同济大学计算机系《计算机系统结构》专业课的课程设计,16级计科学生作品,成功申优免考。
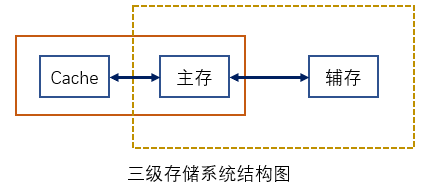
目前,大多数计算机都采用的Cache(高速缓冲存储器)、主存储器和‘’磁盘存储器(辅存)构成的三级存储系统,这个存储系统可以看成是“Cache-主存”和“主存-辅存”层次组成的系统。
这一设计是为了解决存储容量和速度的矛盾,大大提升计算机系统的性能。其具有如此神奇作用的原因则是程序的局部性原理——包括空间的局部性和时间的局部性。
“Cache-主存”和“主存-辅存”这两个层次的对比如下面的表格:
| “Cache-主存”层次 | “主存-辅存”层次 | |
|---|---|---|
| 目的 | 弥补主存速度的不足 | 弥补主存容量的不足 |
| 存储管理的实现 | 全部由硬件实现 | 主要由软件实现 |
| 访问速度比值 | 几比一 | 几万比一 |
| 典型块大小 | 几十~几百字节 | 几千字节 |
| CPU对第二级的访问方式 | 可直接访问 | 均通过第一级 |
| 不命中CPU时是否切换 | 不切换 | 切换到其他进程 |
在本次提升实验之中,也遵循这样的设计原则。即“Cache-主存”这一层次对程序员来说是完全透明的,程序员直接给地址访问主存,Cache则默默无闻地工作,完全由硬件实现。
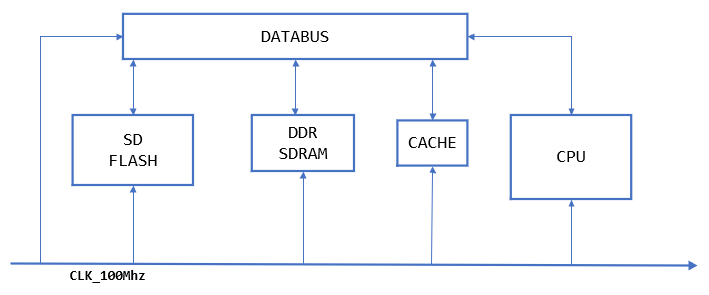
这是三级存储系统的总框图,是一个较为抽象的概念图,具体实现则需要结合硬件实验环境选取合适的部件。
硬件环境:
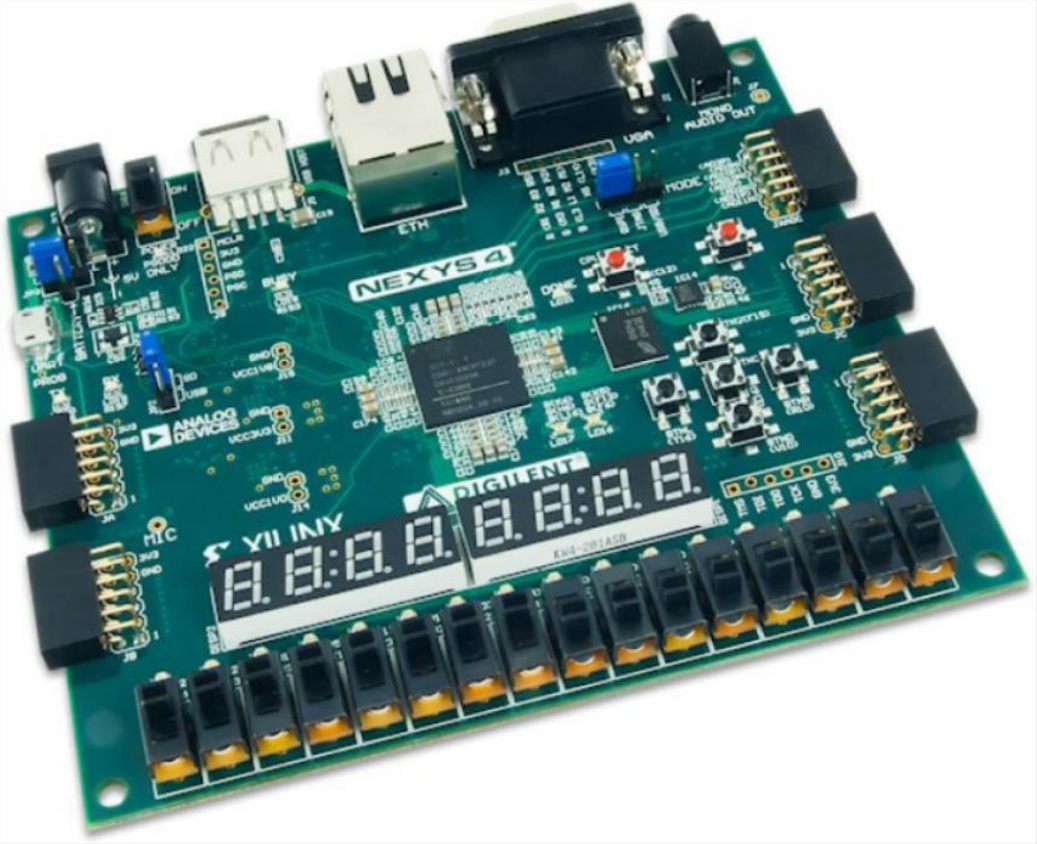
我们本次提升实验的硬件环境为Digilent Nexys4 DDR Artix-7 FPGA Board开发板。这一开发板上带有一块容量为128M DDR2 SDRAM,可以作为我们的主存SDRAM。还有SD的卡槽,可以把SD Flash作为我们的第三级存储(辅存)。
使用Distributed Memory作为Cache。
板上的100 MHz的时钟接入此系统,并通过分频器给每个部件合适的频率。
软件环境:
软件环境为windows10操作系统下的Vivado 2018.2。
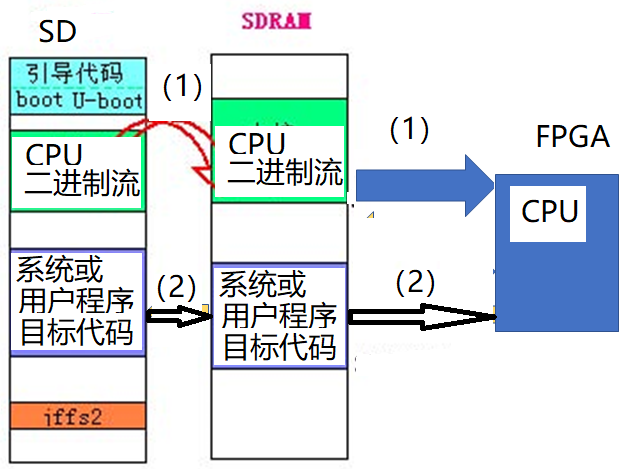
SD卡中存放流水线CPU的二进制流,以及用户程序,N4板上电自动完成如下的任务:
-
- 采用跳线的方式,FPGA自动从SD卡中获取流水线CPU的二进制流,并运行该二进制流,使FPGA成为CPU。
- CPU再按照三级存储的方式访问SDRAM,再由SDRAM从SD卡中把用户程序的目标代码调入到SDRAM,再由CPU把SDRAM中的用户程序目标代码调入到片内CACHE加以运行。
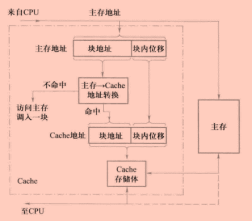
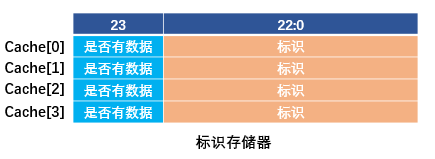
(1) 地址的设计

我将主存地址地址划分为这三个部分。
Cache中的一个块大小为128个字(一个地址对应一个字),所以块内位移的地址位数应该是7位。
Cache中一共有四个块,所以索引位为2位。
其余的高位则作为标识位。 Cache工作的基本原理如图所示。
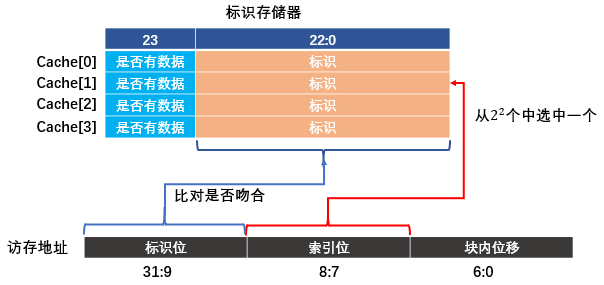
(2) Cache映射与替换
在本次提升实验中,我选取了直接映像的方式。主存的块大小和Cache块设为一样,都是128个字的大小。映射的规则可以用下面的示意图形象的表示出来。
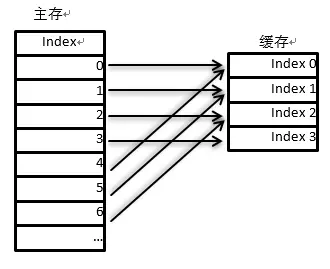
主存中的每一个块只能被放置到Cache中唯一的一个位置,从主存块到Cache块的对应关系是依次循环分配的。
如果主存块的索引为i,它映射到Cache块的索引为j,设Cache的块数为M,则有下面的对应关系:$$j=i mod M$$
这样我们可以很方便地通过主存块地址的低2位去选择直接映像Cache中的块。为了实现判断是否命中,我在DataBus中设置了一个标识寄存器。
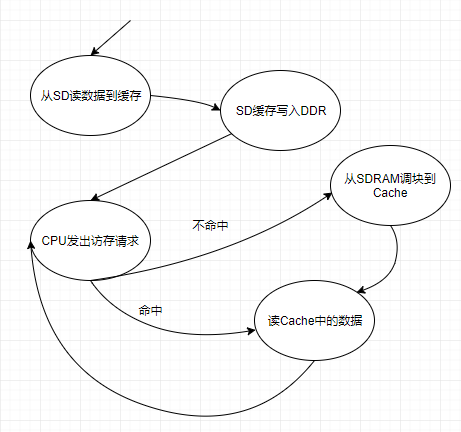
CPU做访存操作的流程大致如下。
如果发现标识寄存器中对应的单元,其最高位为0或者最高位虽然为1但是标识与访存地址的标识不符,则要启动替换(加载过程),将主存SDRAM中的数据块调入Cache中,同时修改标识寄存器,继续刚才的访存操作就会命中取得数据。
三级存储子系统与CPU协调工作。CPU会告诉存储子系统访问的地址,存储子系统会通知CPU工作状态(是否忙)和取出的数据。CPU的工作是高速的,存储子系统是低速的、时常停顿的。因此我在数据总线模 块DataBus与CPU的连接上给CPU一个busy、done的信号,当DataBus忙的时候,busy信号有效,CPU的流水线必须通过stall控制器实现暂停等待,当done信号有效的时候说明读写数据完成,CPU可以继续运行。
开发板在上电后,会自动从外存中加载比特流(SOPC.bit)文件下板,使FPGA变成CPU。然后系统会自动地从SD卡的0地址处读出MIPS指令放入SD缓存中,然后DataBus会启动booting过程,将SD缓存中的指令数据搬到DDR SDRAM(主存)。
CPU初始状态会读取0地址,因为一开始Cache中是没有数据的,故标识存储器也是无效状态,读不命中。这时DataBus将会控制SDRAM和Cache,将SDRAM中对应的数据块调入直接映像的CPU中并修改标识存储器,然后发送done信号并将读出的数据送给CPU。程序得以启动。
在运行的过程中,如果发现Cache中数据块有数据但不是对应标识的,也会启动调块过程,将Cache块中的数据替换掉。
DDR是Nexys4板上的Nexys4板子上的一个资源,容量为128M。DDR的操作非常复杂,需要借助一个IP核Memory Interface Generator,简称MIG(当然用了MIG还是非常复杂,需要多级封装)。
MIG能够封装DDR的物理层信号,用户不需要对物理信号有所了解,只需要关注应用信号。MIG需要按照资料中指导的操作生成。但是由于DDR相较于cpu属于慢速的设备,所以要协调工作的话还要靠下面的MIG控制器。IP核生成后,需要将DDR的物理接口添加到顶层模块,但无需再在XDC文件中配置端口,因为生成过程中已经配置好了。
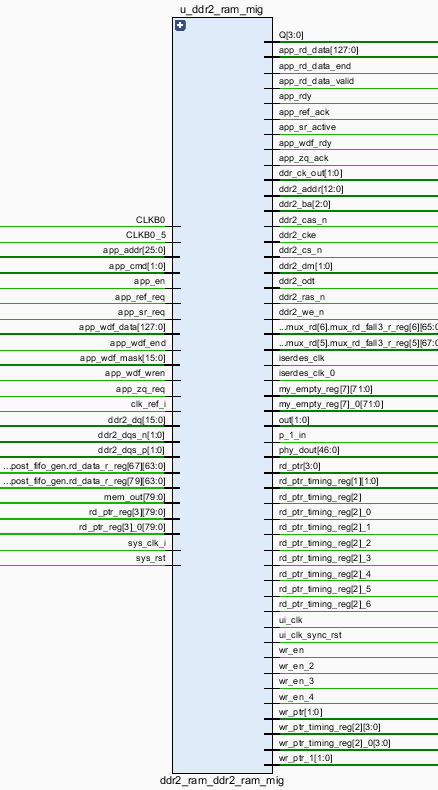
其中,需要连接到最顶层的物理接口如下:
inout [15:0] ddr2_dq,
inout [1:0] ddr2_dqs_n,
inout [1:0] ddr2_dqs_p,
output [12:0] ddr2_addr,
output [2:0] ddr2_ba,
output ddr2_ras_n,
output ddr2_cas_n,
output ddr2_we_n,
output [0:0] ddr2_ck_p,
output [0:0] ddr2_ck_n,
output [0:0] ddr2_cke,
output [0:0] ddr2_cs_n,
output [1:0] ddr2_dm,
output [0:0] ddr2_odt应用接口及其含义为:
app_addr[26:0]:访问的地址
app_cmd[2:0]:命令类型,000为写入,001为读取
app_en:高位有效信号,表明地址地址和命令已经有效,发出握手信号
app_rdy:高电平代表接口已经准备好接收命令了。若app_en发出后该信号无效,上述信号应重新发送
app_rd_data[63:0]:读出的数据
app_rd_data_valid:高电平代表读出的数据有效
app_wdf_data[63:0]:要写入的数据
app_wdf_end:代表当前的数据是本次写入数据的结尾
app_wdf_mask[7:0]:掩码,用于指定输入数据的哪些位会被写入到DDR中。若都是0的话,则所有位都会被写入。
app_wdf_rdy:高电平代表接口处于准备状态,可以写入数据
app_wdf_wren:高电平有效,写入允许信号。只有当app_wdf_wren和app_wdf_rdy均有效的时候,数据才会被写入到DDR中。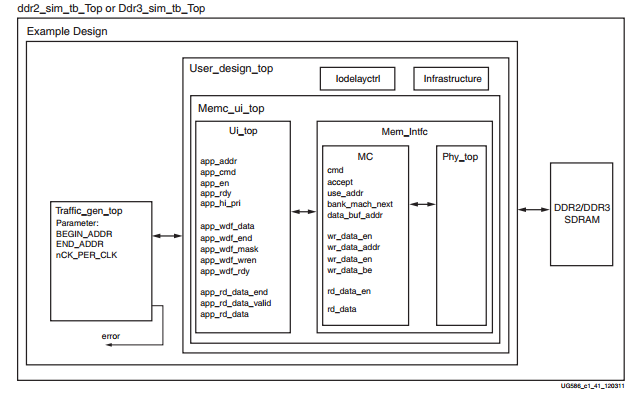
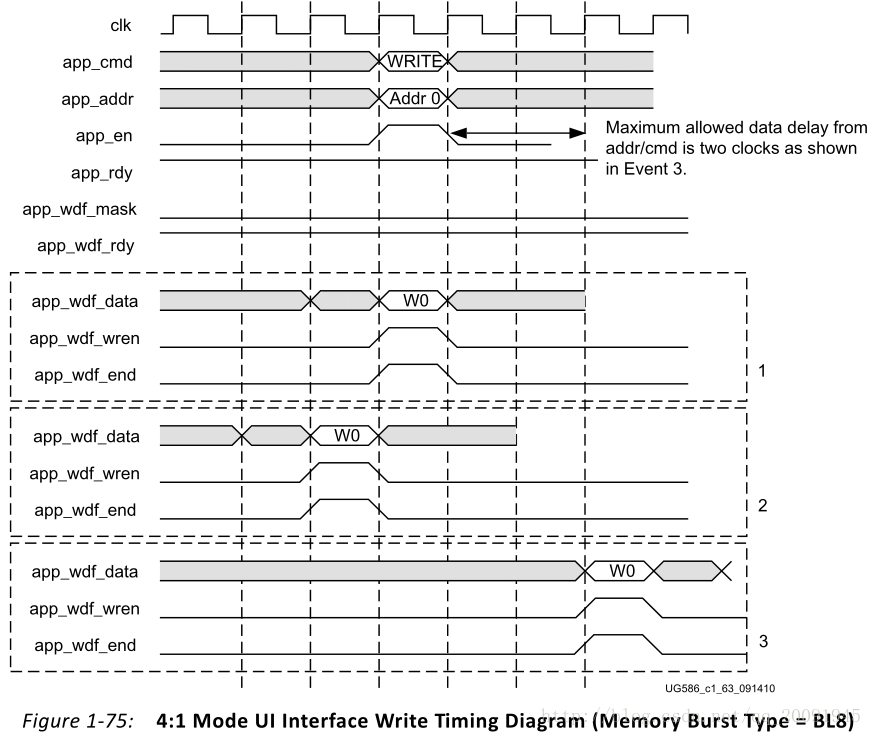
MIG需要再次封装,根据官方手册中读写时序的要求,给出相应的控制信号。
写操作的时序:
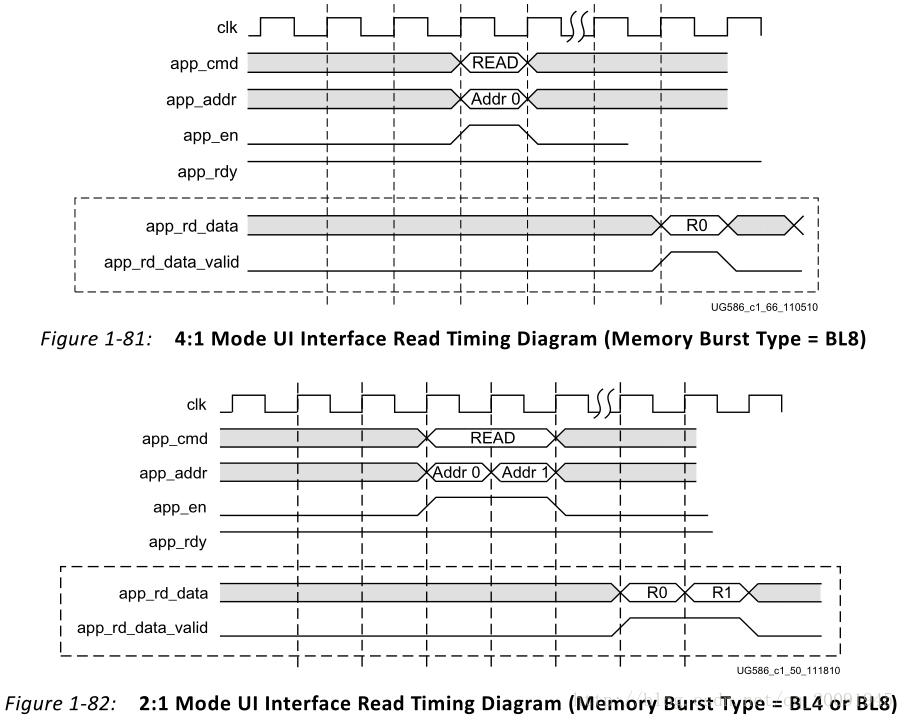
读操作的时序:
非工作状态:
令app_en无效,app_wdf_wren和app_wdf_end等信号也无效。该步不应省略,否则可能会出现实际要工作时无法写入等情况。
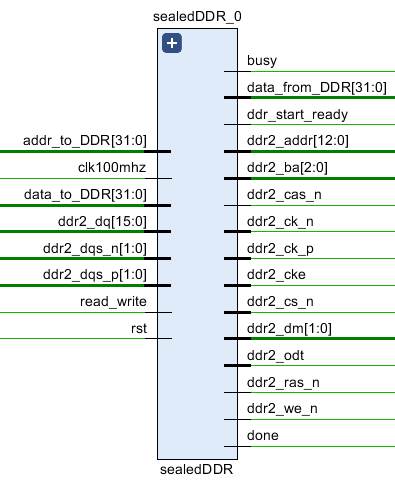
在实际的实验过程中,出现了很多的问题,MIG的同步性并不好,为了更好地工作,我将MIG改成了同步工作的部件。当给DDR发出一个读/写请求后,DDR控制器会陷入工作状态,置busy为1done为0,维持给MIG的读写请求的一段时间确保读写一定完成,再置busy为0 done为1。这样封装好的DDR部件,我将其命名为sealedDDR.v
经过无数次的实验和仿真,确定了设反复读写次数为256是一定无误的。所以我封装后的DDR的工作周期为100Mhz/256.
封装好的DDR模块可以连接到数据总线DataBus上去,sealedDDr的模块图如下所示:
Cache块是通过一个Distributed Memory实现的。容量为512个字,和前面对Cache的设计保持一致,4个块每个块128个字,4×128=512。
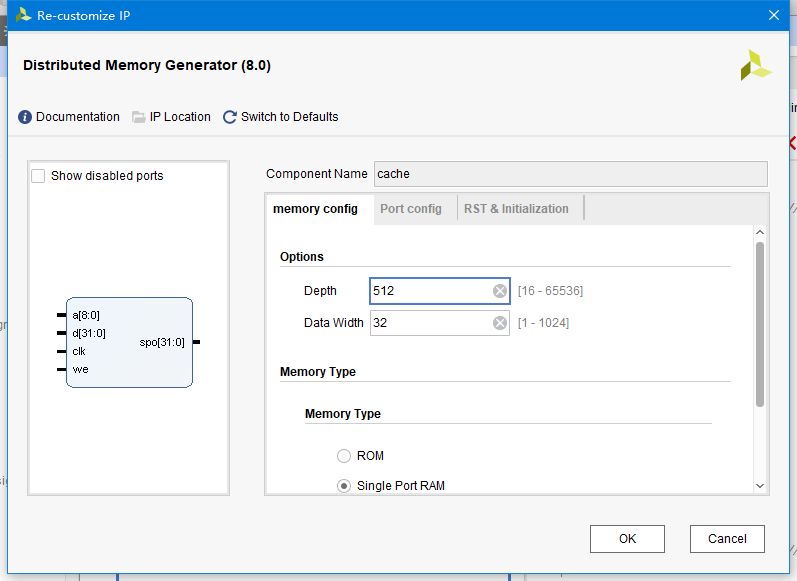
Cache是可读可写的,所以这里设置Memory Type为Single Port RAM。
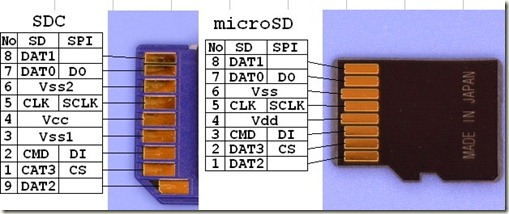
SD卡为移动设备提供了安全的,大容量存储解决方法。它本身可以通过两种总线模式进行数据传输,一种是称为SD BUS的4位串行数据模式,另一种就是本次实验采用的4线SPI Bus模式。
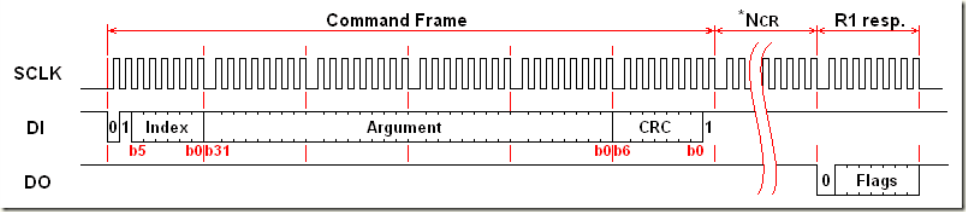
- 初始化操作
SPI模式下的初始化操作有:上电->进入SPI模式(CMD0)->检测当前MCU电压是否符合SD卡的要求(CMD8)->开始初始化(ACMD41)->读取卡类型(CMD58)。
上电
当电压达到SD卡的最小工作电压的后,必须使CS,DI为高电平,输出最少74个时钟脉冲后,才能开始发送第一个命令。
初始化
SD卡上电后处于SD Bus模式,使CS保持为0,并且发送CMD0命令,SD卡就会进入到SPI模式。 初始化完成后,通过发送CMD58指令读取卡的类型(OCR寄存器的CCS位[30]), CCS为1表示当前卡的类型为SDXC或者SDHC,为0表示卡的类型为SDSC。
- 数据读写操作
读取单个数据块
发出读取单个数据块命令CMD17,若SD卡返回响应无错误(返回0),则开始等待数据块起始标识符0xFE, 然后开始读取数据块和CRC校验。
读取多个数据块
读取多个数据块操作和读取单个数据块的相似,先发送命令CMD18,然后开始等待数据块的起始标识符。需要停止读取操作时,发送CMD12命令,返回响应为0表示SD卡处于忙碌状态,只有返回任何不为0的值后,才能发送下一条命令。
- SD卡封装
SD模块给出工作状态信号sd_mem_ready,只有有效后才能进入BOOTING状态。
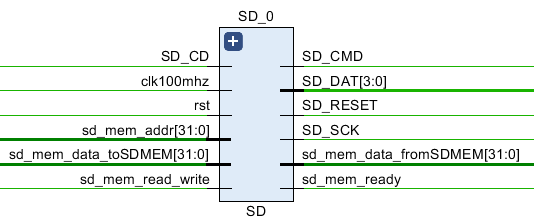
SD卡的数据,每当系统初始或者reset的时候,就会重新读入SD缓存中,为搬入DDR做准备。
数据总线DataBus模块可以说是整个三级存储的核心部件。虽然叫DataBus,起到构建数据通路,连接存储部件的作用。但是实际上它是三级存储的核心控制器,既负责和CPU配合同步,又负责给出所有存储模块(辅存SD FLASH、主存DDR SDRAM、高速缓存Cache)的读写信号并控制数据流向。
DataBus的模块图如下:
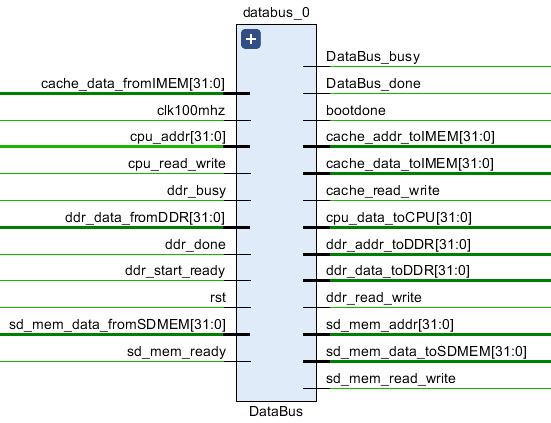
它的连线连接了CPU、SD、DDR和Cache.
DataBus是一个有限状态自动机,总共有4个工作状态:
| 名称 | 含义 |
|---|---|
| UNINITIALIZED | 未初始化,是系统刚上电或者复位后的状态。由于DDR和SD模块都有一个初始化的过程,所以本状态需要接收DDR和SD的Ready信号后才进入BOOTING状态。 |
| BOOTING | 系统正在初始化中,这一个状态是SD中的数据向主存DDR写入的过程。通过两个计数器,用二重循环将DDR中的数据块一个一个写上数据。BOOTING结束后转入READIMEM状态。 |
| READIMEM | 读Cache状态:在这里比对地址和标识存储器,判断是否命中,如果Cache命中,Cache中的数据送出DataBus;否则转入DDRTOIMEM状态。 |
| DDRTOIMEM | Cache发生未命中后,DDR中的数据块往Cache中调的过程。掉块结束后将转入READIMEM状态。 |
五级流水线CPU是平时实验完成的内容,这里不再多介绍。
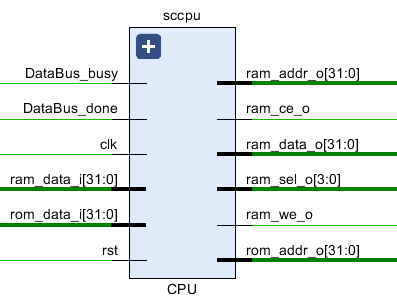
此处对CPU稍做的改造是,向CPU传入DataBus的工作状态,并把工作状态信号传入CPU的暂停控制模块中,将给CPU一个新的暂停的理由,以达到三级存储子系统和CPU协调工作的目的。当DataBus忙的时候,stall信号全1,将CPU所有部件暂停;等待done信号到来继续工作。
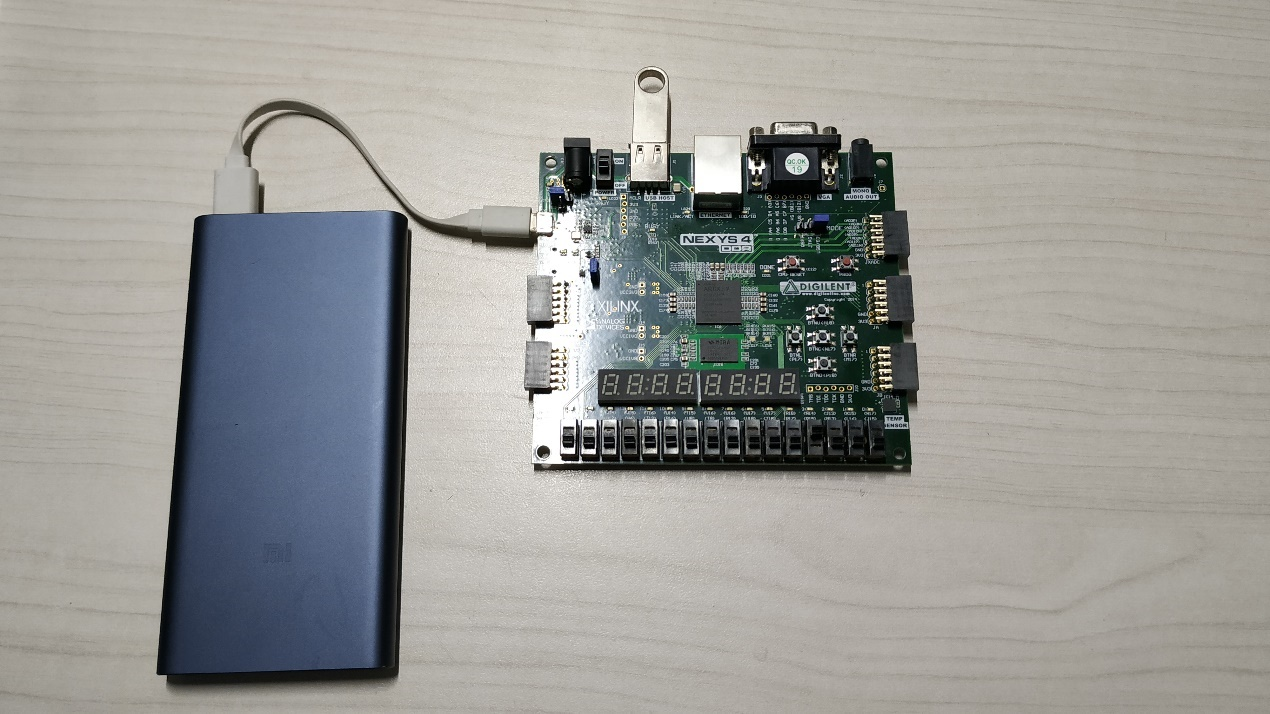
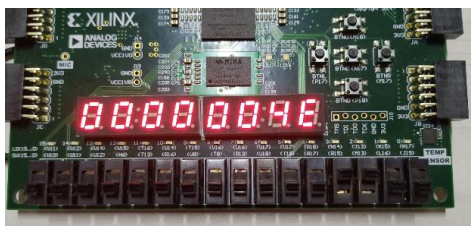
使用移动电源供电。比特流在u盘中,应用程序在SD卡中。
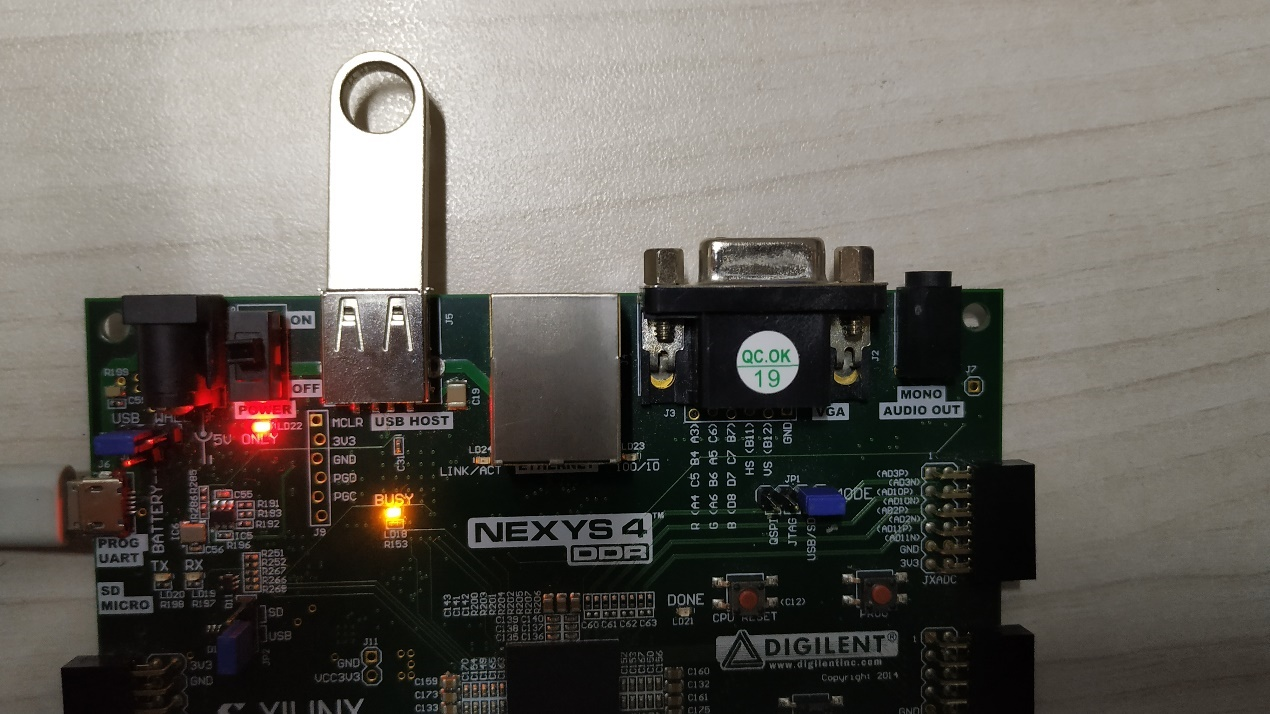
黄色的BUSY灯常亮,说明正在下板。
为了便于了解系统的工作状况,我将LED[2:0]这三个接了特殊的信号。LED[0]用于显示系统是否就绪;
LED[1]亮时表示从存储子系统读到了数据;
LED[2]表示存储子系统正忙,可能是正在启动,也可能时因为发生Cache块的装入、替换。除了最开始启动,其他时间一般忙的时间非常短暂,LED[2]只会闪一下。

上图只有LED[2]亮,这是系统刚通电,存储子系统未就绪。
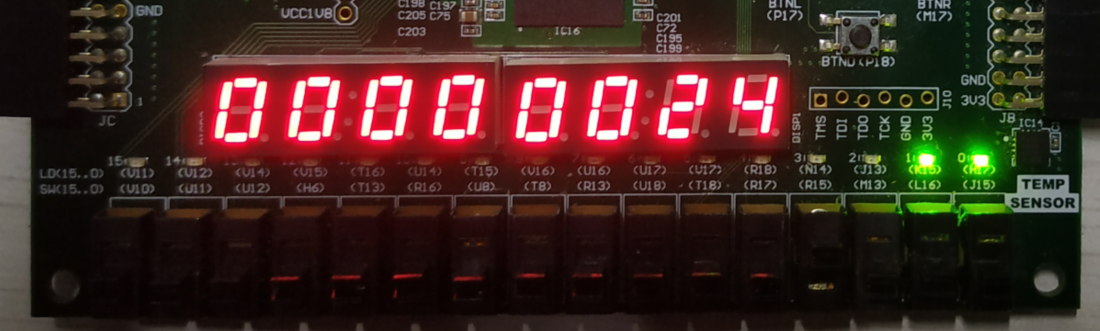
上图LED[0]、LED[1]亮,表示系统就绪并且从存储子系统中读出了数据。
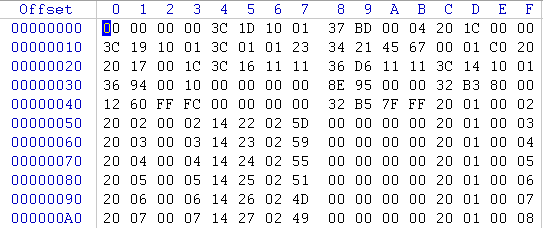
使用
软件,从SD卡0地址开始写入应用程序。
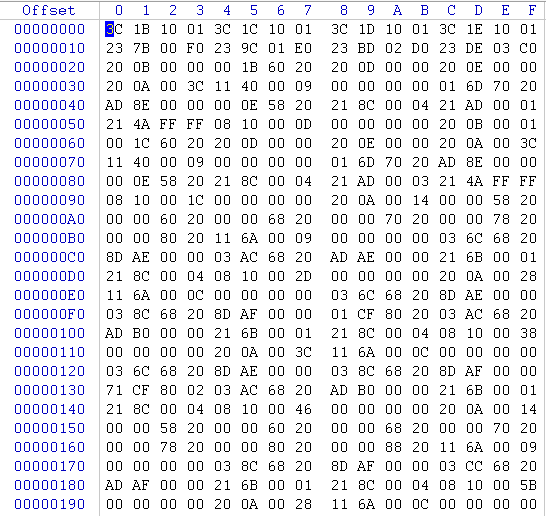
上面写的时系统结构静态流水线CPU的测试程序。
下板执行:
C[12]
C[24]
D[18]
D[26]
下板拨动开关遍历数组,逐一和 Mars 的结果对比,结果一致,说明流水线工作正常。
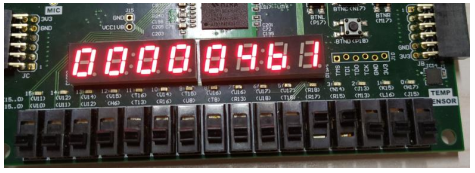
不重新下板,更换写着另一个程序的SD卡,按下reset键,板子将跑新的程序。
这里我换上的是《计算机组成原理》课程用于验证CPU功能的测试程序。
下板结果:
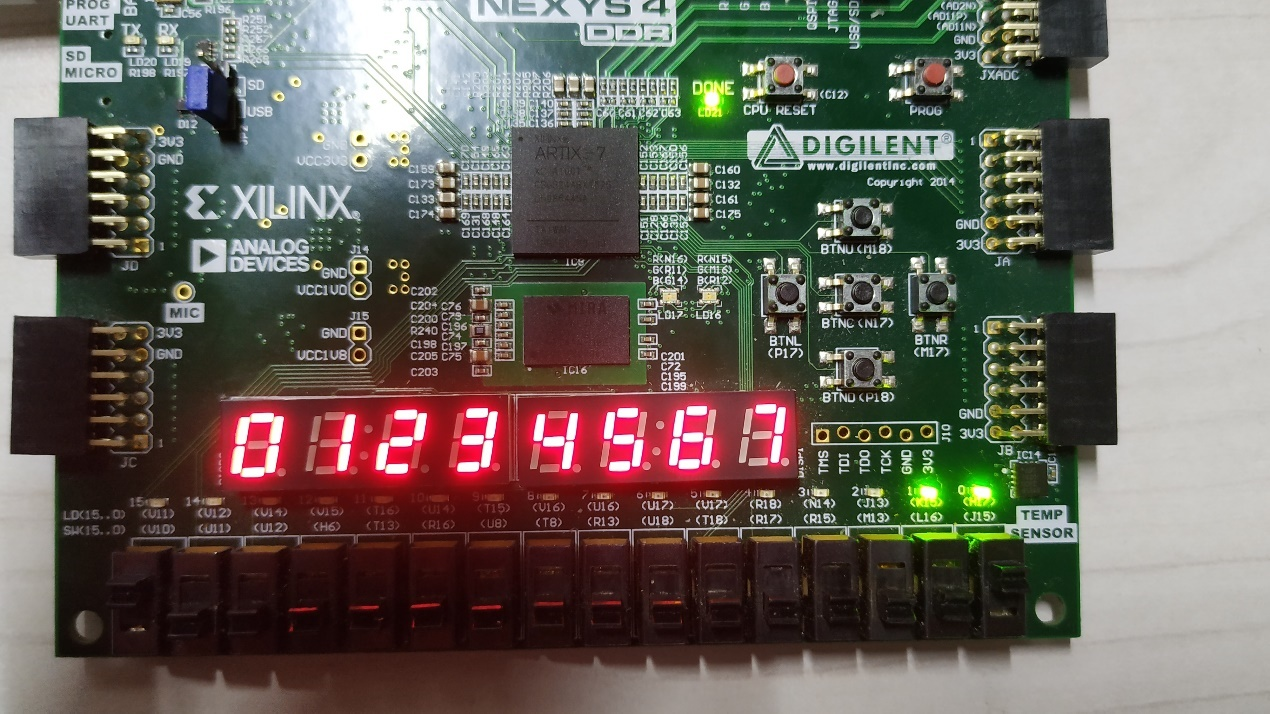
下板结果为1~F依次从右边流出,循环往复,符和预期结果,中途替换SD卡成功。
本次实验是我用Vivado以来,写过最难的一个项目。难点不仅在于模块众多、时序复杂、仿真困难,还在于需要查阅大量的资料来实现SD卡和DDR的使用。
万丈高楼,平地升起。做数字系统设计也是如此,我的基本思路是,先做一个整体设计,将大系统划分为子系统,然后逐个模块击破,最后将他们连接起来。具体来说,CPU是之前完成的,那么首先要完成本次实验要用到的存储部件,包括DDR SDRAM、SD卡的读写。接着,要根据《计算机系统结构》课程所学的三级存储的知识,设计合适的地址划分、Cache映射和替换方案,然后写一个三级存储总控制器来控制三级部件的协作。
这次提升实验,我最大的收获,莫过于看了无数的波形,让我深刻体会到下板不如看波形,许多BUG都是我在看波形的时候解决的。这也极大的锻炼了我设计仿真、观察信号和系统工作过程的能力。所谓提升实验,不仅是难度的提升,也是对能力的提升。
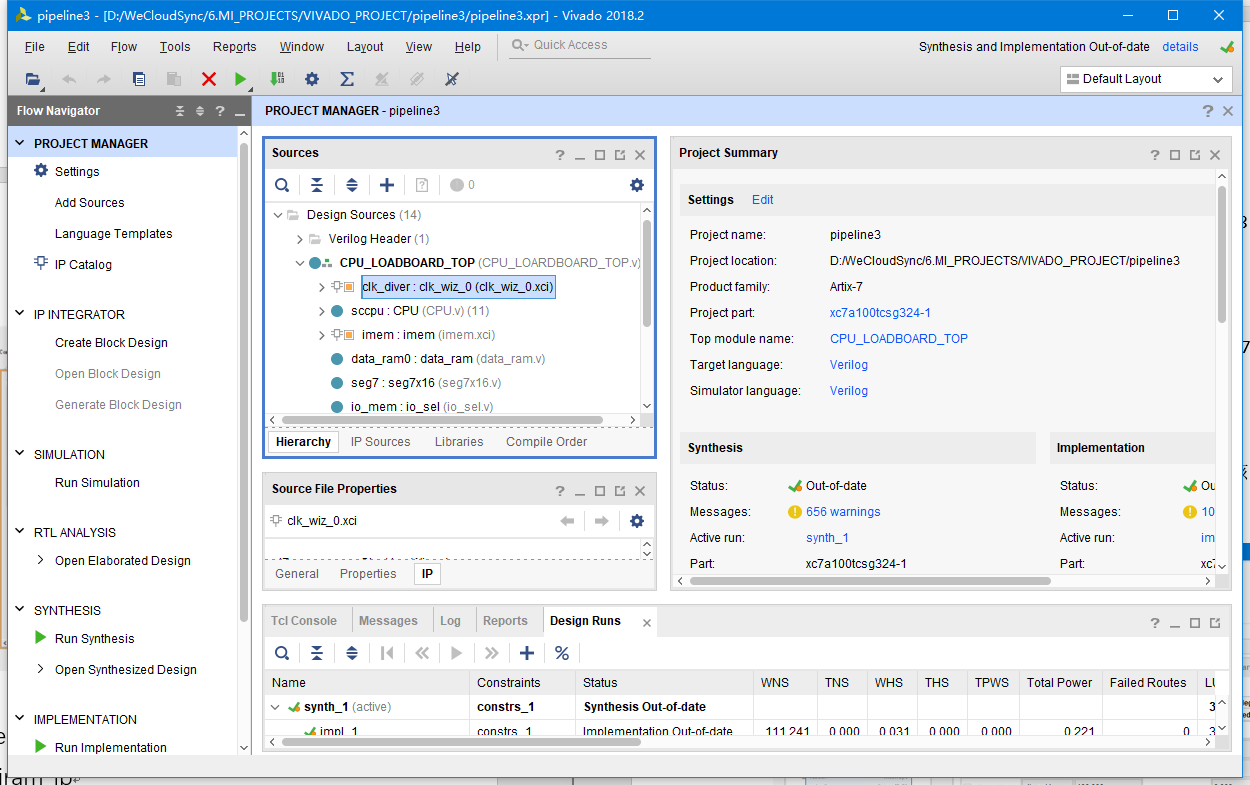
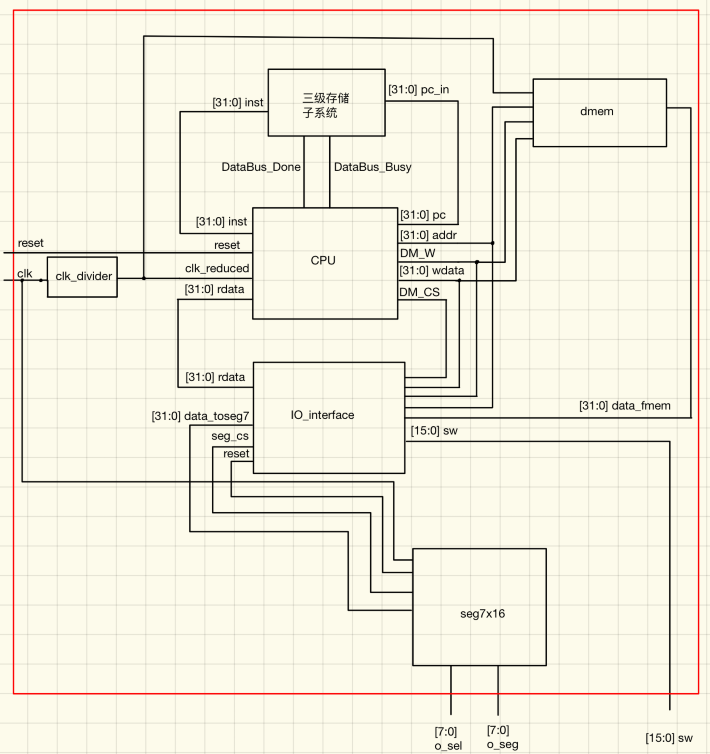
整个Vivado项目中,模块的层次如下图所示。
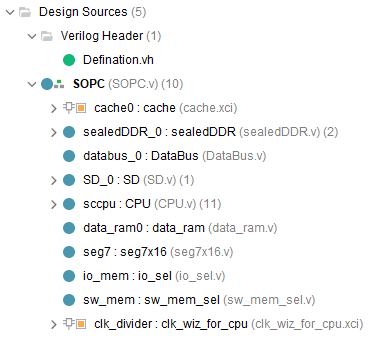
由于文件过多,这里不在报告中贴出。详细代码请见附件。下面给出源程序文件的说明。
源程序文件可以分为以下三类(仅列出模块文件,未列出仿真文件、波形格式文件、管脚约束文件等)
- 第一类:三级存储子系统模块
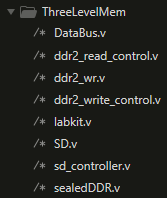
| 文件名 | 说明 |
|---|---|
| DataBus.v | 三级存储总控制器 |
| ddr_read_control.v | DDR读控制模块 |
| ddr_wr.v | DDR控制器 |
| ddr_write_control.v | DDR写控制模块 |
| labkit.v | SD用户控制模块 |
| SD | SD封装 |
| sd_controller.v | SD物理信号控制器 |
| sealedDDR.v | DDR封装 |
- 第二类:动态流水线CPU模块

| 文件名 | 说明 |
|---|---|
| io_sel.v | 外设编址器 |
| sw_mem_sel.v | 开关编址信号控制 |
| ALU.v | 算术逻辑运算单元 |
| ControlUnit.v | 译码段 |
| CPU.v | CPU封装 |
| ctrl.v | 流水暂停控制器 |
| data_ram.v | 数据RAM |
| DIV_m.v | 有符号除法器 |
| DIVU.v | 无符号除法器 |
| ex.v | 执行段 |
| ex_mem.v | 执行-访存流水寄存器 |
| hilo_reg.v | hilo寄存器 |
| id_ex.v | 译码-执行流水寄存器 |
| if_id.v | 取址-译码流水寄存器 |
| MDU.v | 乘除法单元 |
| mem.v | 访存段 |
| mem_wb.v | 访存-写回流水寄存器 |
| mult.v | 有符号乘法器 |
| multu.v | 无符号乘法器 |
| pc_reg.v | PC寄存器 |
| regfile.v | 通用寄存器堆 |
- 第三类:顶层模块
| 文件名 | 说明 |
|---|---|
| Defination.vh | 宏定义文件 |
| seg7x16.v | 七段数码管控制器 |
| SOPC.v | 系统整体封装顶层文件 |